Kolejny etap projektu "10.5": Roboty mBot Ranger uczą się śledzić linię
Galeria zdjęć 4


#FunduszeUE
#FunduszeEuropejskie
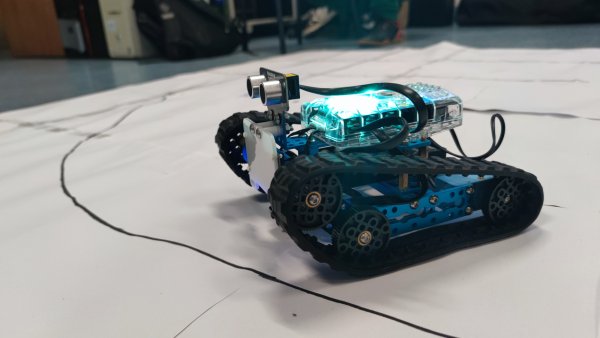
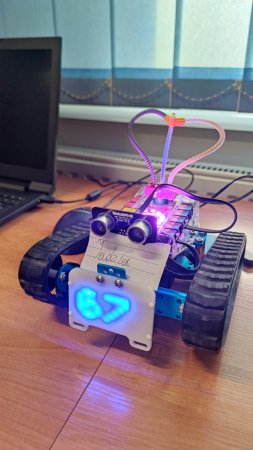
W ramach kontynuacji projektu "10.5" odbyły się kolejne, pełne wyzwań zajęcia z programowania robotów mBot Ranger. Uczestnicy, wykorzystując graficzne środowisko mBlock, skupili się tym razem na precyzyjnym sterowaniu za pomocą czujnika linii. Unikalnym elementem warsztatów była praca na autorskich planszach testowych, które uczniowie zaprojektowali i własnoręcznie narysowali. Głównym zadaniem dla robotów było precyzyjne podążanie po narysowanych, często krętych, torach. Programiści musieli napisać skrypt, który w zależności od odczytu czujnika, włączał odpowiednie sygnały świetlne na obudowie robota. Gdy czujnik wykrywał ciemną linię, robot zapalał zielone diody, sygnalizując prawidłowy tor jazdy. W momencie utraty linii, czyli wykrycia jaśniejszego podłoża, mBot Ranger reagował migającą na czerwono lampą, co informowało o zjechaniu z trasy. Taka wizualna informacja zwrotna pozwalała na bieżąco monitorować działanie algorytmu i wprowadzać niezbędne poprawki w kodzie. Łącząc pracę manualną przy tworzeniu tras z programowaniem reakcji świetlnych, zajęcia rozwijały zarówno kreatywność, jak i logiczne myślenie. Warsztaty udowodniły, że nawet z pozoru proste zadanie śledzenia linii może stanowić fascynującą i złożoną misję dla początkujących programistów robotów.
